|
Yang(Kevin) Liu I'm a junior undergraduate student at the UMN, pursuing a B.A. in Computer Science. I work with Hongbo Zhang at the Legged Robot Lab, focusing on perceptive locomotion for legged robots. I was a research intern at Shanghai Qi Zhi Institute, where I had the privilege of being advised by Prof. Hang Zhao and Ziwen Zhuang. |

|
ResearchI'm interested in robot learning, focusing on perceptive locomotion, humanoid loco-manipulation, manipulation, and visuo-tactile learning. |
|
PUMA: Perception-driven Unified Foothold Prior for Mobility Augmented
Quadruped Parkour
Liang Wang, Kanzhong Yao, Yang Liu, Weikan Qin, Jun Wu, Zhe Sun, Qiuguo Zhu Under review project page / arXiv PUMA enables robust quadruped parkour by learning a perception-driven foothold prior from depth and proprioception. |
|
|
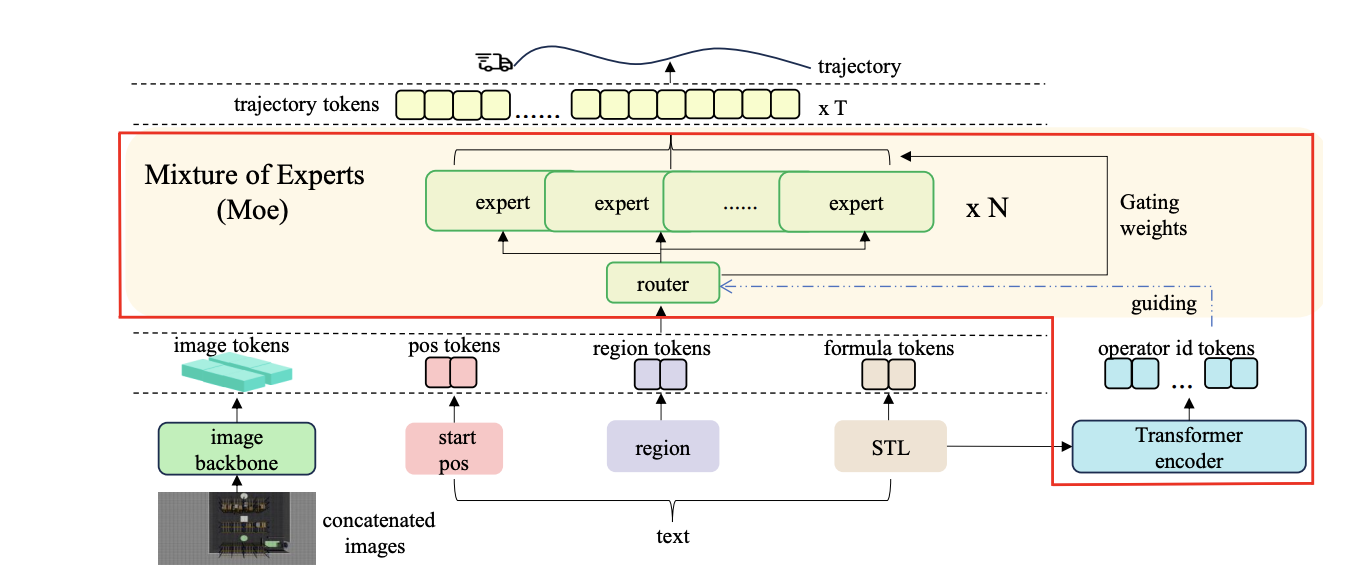
Bridging Perception and Planning: Towards End-to-End Planning
for Signal Temporal Logic Tasks
Bowen Ye, Junyue Huang, Yang Liu, Xiaozhen Qiao, Xiang Yin, ICRA 2026 arXiv An end-to-end perception-to-planning model that maps raw images to feasible trajectories satisfying formal STL constraints. |
ProjectsHere are some fun projects I've worked on outside robotics. |
|
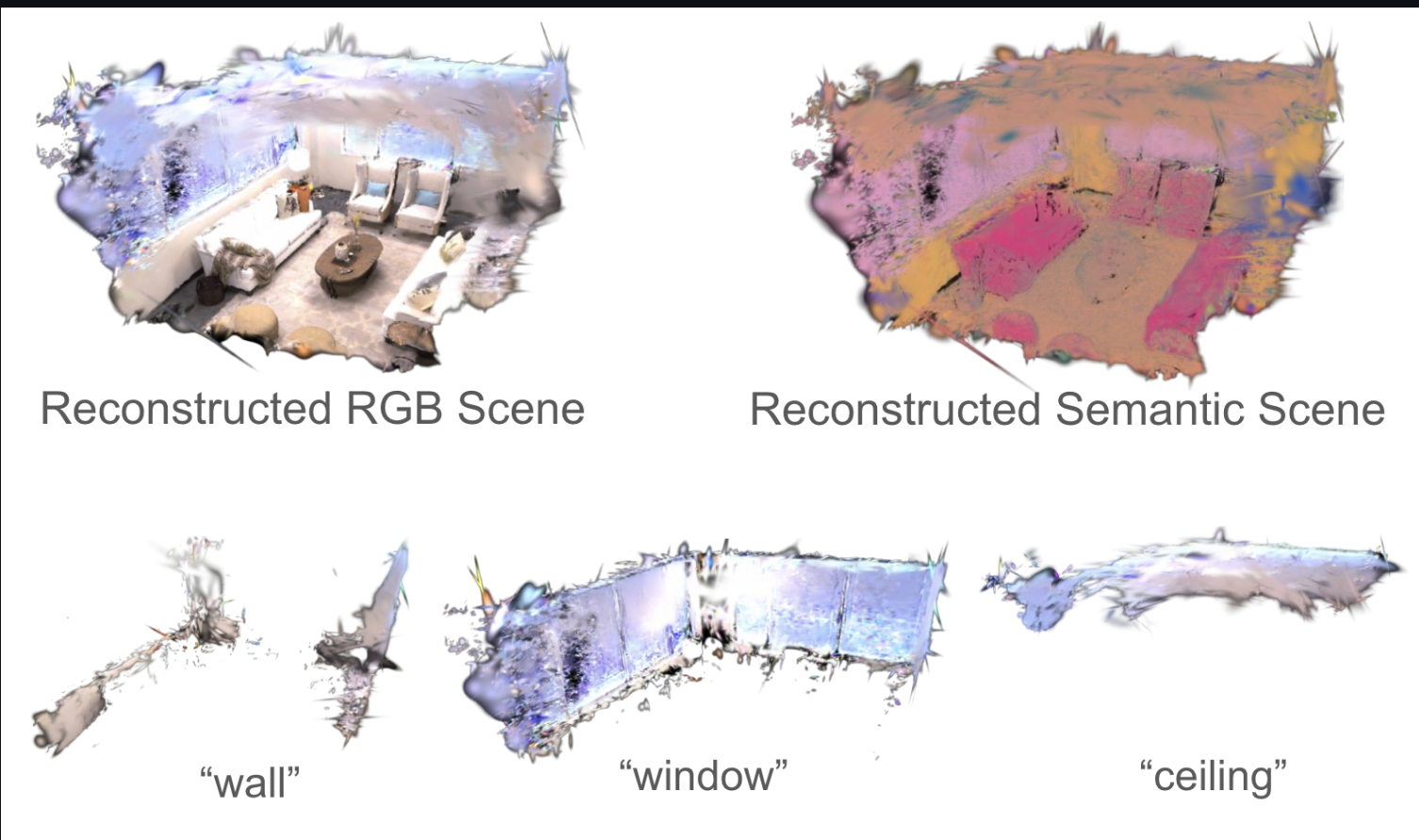
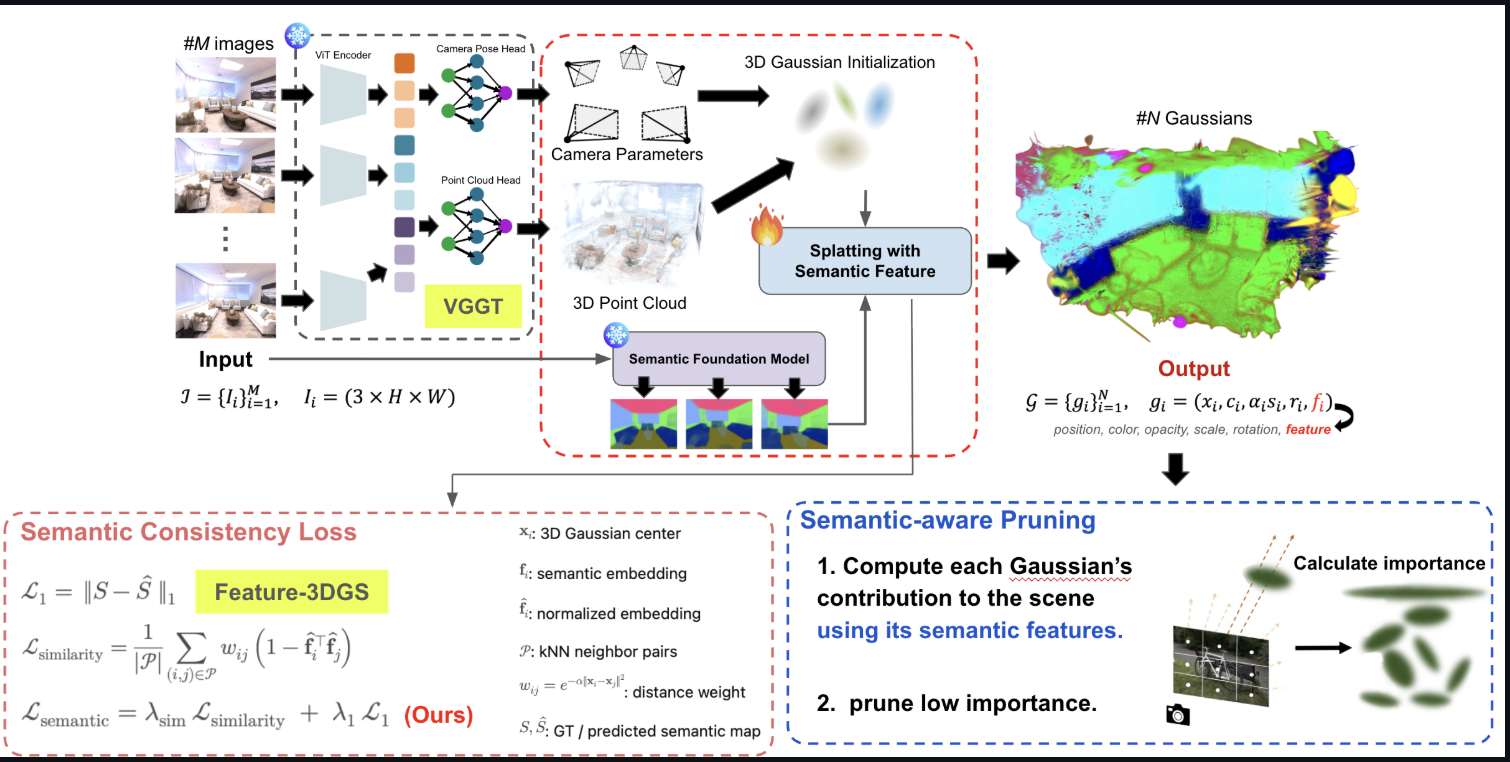
Feed-forward 3D Reconstruction for Spatial Semantic Understanding
Fall 2025 poster / code Semantic-aware Feature-3DGS compression enables efficient scene understanding by pruning Gaussians based on their semantic-loss contribution while stabilizing features via local kNN consistency. |
Miscellanea |
Teaching |
Teaching Assistant, CSCI 1933 Fall 2025 |
Service |
Reviewer, International Conference on Robotics and Automation(ICRA) 2026 |
Hobby |
⚽ Soccer; Go(Weiqi) ⚫️⚪️ |
|
Feel free to steal this website's source code. Do not scrape the HTML from this page itself, as it includes analytics tags that you do not want on your own website — use the github code instead. Also, consider using Leonid Keselman's Jekyll fork of this page. |